2025年度未踏IT人材発掘・育成事業「スーパークリエータ」
SUPER CREATOR
四反田 直樹 したんだ なおき
所属:東京大学 大学院情報理工学系研究科
-
略歴
2000年4月 大阪府生まれ
2019年4月 京都大学 工学部 電気電子工学科 入学
2024年3月 京都大学 工学部 電気電子工学科 卒業
2024年4月 東京大学 大学院情報理工学系研究科 知能機械情報学専攻修士課程 入学
2026年3月 東京大学 大学院情報理工学系研究科 知能機械情報学専攻修士課程 修了
2026年4月 東京大学 大学院情報理工学系研究科 知能機械情報学専攻博士課程 入学 -
受賞歴
2021年11月 テクノ愛2021 優秀賞・奨励賞(大学の部)
2022年11月 テクノ愛2022 奨励賞・健闘賞(大学の部)
2024年3月 京都大学国際教育プログラム 修了
2025年10月 Maker Faire Tokyo Young Maker Challenge スポンサー賞_SLB賞 -
担当プロジェクトマネージャー
稲見 昌彦

開発テーマ名
自己表現のためのモジュール型ソーシャルロボットの開発基盤の構築
概要
本プロジェクトでは、ユーザーが自身の好みに応じて自由に構成・組み立てでき、自らの身体動作で直感的に操作可能なモジュール型ソーシャルロボットの開発基盤である「Katakko」を構築した。従来のレディメイド中心のロボットでは個性の反映が困難であるという課題に対し、専門知識を必要としない形態設計および動作制御を実現するため、ブロック状モジュールとツメ型接続機構からなるハードウェア、カメラによる身体動作認識と画像からのロボット構造推定および関節対応の自動マッピングを行う動作変換技術、さらにWebインタフェースとUnity環境による統合ソフトウェア基盤を開発した。これらは市販部品および3Dプリンタで造形可能な部品によって構成され、オープンソース化を前提として提供される。本システムにより、組み立て・設定・操作・再組み立ての一連のサイクルを統合的に支援し、オリジナルロボットの直感的な試行錯誤を可能にした。さらに、Maker Faire Tokyo 2025およびThe Lab.での展示を通じて、子供を含む幅広いユーザーが自由な形態設計と身体操作を楽しむ様子を確認し、本システムがロボットを自己表現の媒体として活用するための有効な基盤となることを示した。
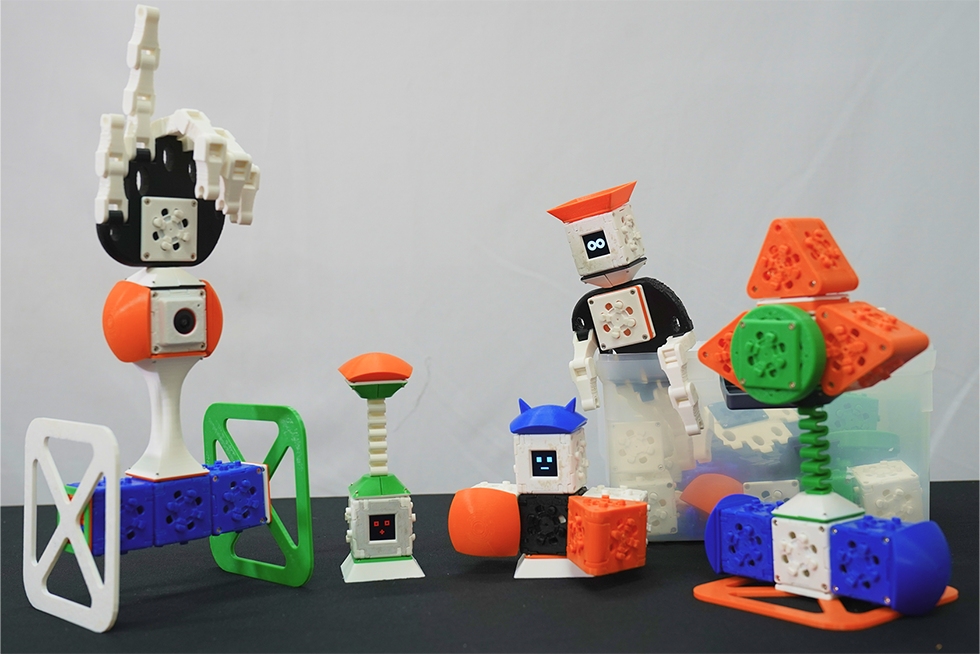
図1: Katakkoを用いて制作されたロボットの例
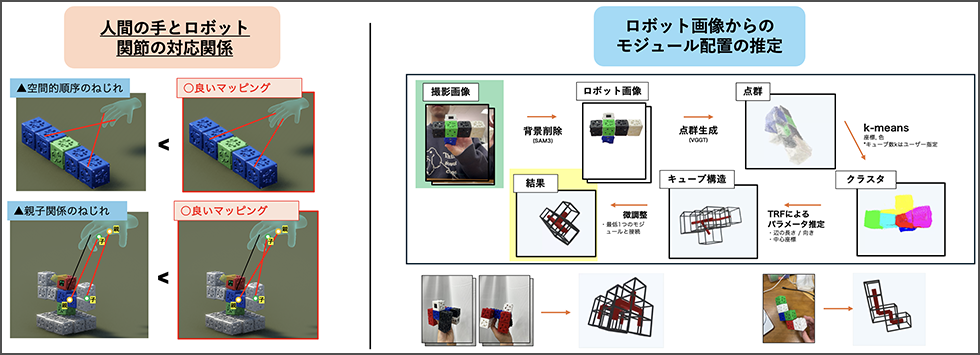
図2: 関節構造に基づいて自動生成されたロボットと人間の手と対応関係(左)、組み立てたロボットの写真からモジュール配置を推定する様子(右)
-
2025年度 未踏IT人材発掘・育成事業 成果報告会(MITOU2025 Demo Day)動画
PMの評価
四反田氏は、東京大学情報理工学系研究科知能機械情報学専攻の大学院生である。本プロジェクトでは、動作マッピングアルゴリズムおよびロボット構造推定システムの設計・実装を担当した。
四反田氏は以下の3つの能力を高い水準で備えている。
構想力:任意の構造を持つロボットと人間の身体を「関節をノードとするグラフ」として抽象化し、遺伝的アルゴリズムで最適な関節対応を自動探索するという定式化は、問題を的確に構造化する力の表れである。リズムベース変換、深層強化学習、なりきり制御といった複数の手法を検討・実装した上で、最終的に採用しなかった手法も含めて判断根拠を整理できている点も、研究者としての構想力を示している。
実装力:遺伝的アルゴリズムによる動作マッピング、SAM3 + VGGTを組み合わせた画像からの3次元構造推定、MuJoCoエクスポートなど、機械学習・コンピュータービジョン・物理シミュレーションにまたがる幅広い技術を実装し、統合した。一般的なPC環境ではGPU資源が限られるという制約にも向き合い、実際にユーザの手元で動くシステムとして仕上げた力は見事である。
展開力:研究・趣味を問わず個人作業が中心だった四反田氏にとって、異なる専門を持つメンバーとの協働は挑戦であったが、専門用語が通じない中で共通項を見出し、ハードウェア・UI・ソフトウェアを相補的に融合させる成果物を生み出した。
以上のことから四反田氏は「スーパークリエータ」の基準を十分に満たしていると判断する。
クリエータからひとこと

未踏での開発成果については、特許出願・オープンソース化およびSIGGRAPH 2026 Emerging Technologiesでのデモ展示に向けて、準備を進めています。博士課程では、器用で汎用的な物体操作が可能なロボットの実現を目指して、スケーラブルな深層強化学習アルゴリズムおよび、学習した方策の実環境適応の研究に取り組んでいます。
